Aitor Jusdado Spuch, estudiante ETSIDI, fabrica un kart eléctrico como proyecto final de carrera
Segundo premio en la III Edición del Premio al Mejor Proyecto Fin de Carrera en Movilidad Sostenible, instituido por la fundación RENAULT para la Movilidad Sostenible.
Aitor Jusdado Spuch, un joven estudiante de nuestra Escuela ha fabricado, como proyecto final de carrera, su propio kart eléctrico, durante el curso 2013-2014. Este proyecto ha obtenido el segundo premio en la III Edición del Premio al Mejor Proyecto Fin de Carrera en Movilidad Sostenible, instituido por la fundación RENAULT para la Movilidad Sostenible. El premio consta de un diploma acreditativo y un cheque por valor de 1.000 €. El acto de entrega del premio tuvo lugar en Madrid, en la sede principal de Renault España, el 27 de noviembre de 2014. Asistieron al acto: Ernesto Salas Hernández (Director de la FRMS) Fundación Renault para la Movilidad Sostenible y Ricardo Yuji Gondo (Director General de RENAULT España Comercial).
El vehículo en cuestión es un kart eléctrico puro, con regeneración de energía en la frenada, y una placa de diseño propio que permite la obtención de datos en tiempo real de forma inalámbrica. Éstos son transferidos al PC donde las variables se visualizan a través de Labview. También permite la gestión de la recarga automática de baterías.
En palabras de su propio creador, la idea del proyecto era construir un kart eléctrico plenamente operativo, con prestaciones similares a uno de gasolina, pero introduciendo el valor añadido de la movilidad sostenible. Además, y buscando la innovación, nos comenta que diseñó e instaló una placa que le permitiera generar y gestionar la información de su actividad, mediante una aplicación remota (la conocida como telemetría). Esta tecnología es la que emplean vehículos de competición, como los Fórmula 1, lugar en el que, algún día, este joven y prometedor ingeniero pretende recalar.
Centrándonos ya en la mecánica, Aitor apunta que este kart eléctrico dispone de un motor de corriente continua tipo 'brushless' con un potencia nominal de 5kW (6,8 CV) y una potencia de pico 10kW (13,6 CV). Esta elección radica en la búsqueda de elementos de sostenibilidad como es la eficiencia energética, o la regeneración de energía en la frenada. El propulsor está regulado electrónicamente por un controlador programable, de la firma Kelly Controller, modelo KBL36301. Éste tiene una eficiencia del 99% y la capacidad de gestionar la frenada regenerativa mediante la conmutación del circuito de potencia.
Para proporcionar y guardar la energía se ha recurrido a unas baterías Optima YTU4.2, con tecnología de plomo ácido avanzado y configuración de celdas cilíndricas. Son de tipo AGM, en las que el electrolito se absorbe por capilaridad, mediante unas finas láminas de fibra de vidrio, situadas entre las placas de las celdas. Todas ellas están conectadas por un circuito serie y que da como resultado una densidad energética superior a los 5,9kWh.
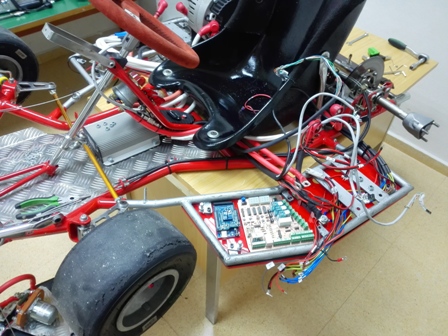
Por otro lado, y como nos recuerda Aitor, con la PCB integrada de diseño propio, se busca centralizar el cableado, recoger las señales de los sensores, tratar dichas señales, comunicarse con el microcontrolador auxiliar (Arduino Mega 2560), gestionar la recarga automática y alimentar los periféricos.
También se emplean ‘displays’ para mostrar la información sobre el estado del kart. Éstos se sitúan en el panel del coche, justo debajo del volante.
El microcontrolador auxiliar tiene funciones de mando y control de tareas como la recarga automática, el tratamiento de algunas señales para su interpretación lógica, y la mediación entre la placa electrónica y los módulos de radio para la comunicación inalámbrica. Estos últimos son los XBee PRO, cuyo alcance en línea recta supera los 1.500 metros entre emisor y receptor, sin que en ningún momento existan pérdidas de información.
Todo este proyecto recoge una gran dedicación, muchas horas de trabajo y una gran ilusión por parte de su autor. Las pruebas finales en pista dieron como resultado la validación de los datos teóricos y unas fantásticas sensaciones al volante. Algunos de los parámetros recogidos se muestran a continuación. Esperemos que este proyecto sirva como propulsor de muchos otros proyectos relacionados con el mundo del motor y la movilidad sostenible.
Los resultados dinámicos experimentales:
- Velocidad punta: 44,5km/h
- Aceleración máxima: 2,1m/s2
- Potencia requerida: 6,5kW
- Autonomía: +/- 50km (2 a 3 horas, según el tipo de conducción)
- Par de arranque máximo: 83,2 Nm
- Relación de transmisión: 1:2,22
Durante los próximos días 2, 3, 4 y 5 de diciembre se realizará una exposición estática en el vestíbulo de la Escuela, desarrollándose una demostración práctica el viernes día 5 de diciembre en la cancha de baloncesto de la Escuela a las 14 horas.